Notes for Next Version (2012)
– use 3 inch bend sensors on all joints to insure overlap and avoid clicking sound
– finish fingertips so that fabric does not fray
– include small loops as grip points to help with taking gloves off
– can we mirror the x-imus to reflect symmetry of the human body???
– how can we work with the symmetry of the human body? should it be compensated for in components (impossible), circuit-board design (possible, but…), wiring (possible, but…), software (possible, but…).
– keep track of how often each pair of gloves is used to get an idea of life-cycle, material wear (possible to do in software?)
connection standards (based on performance pair):
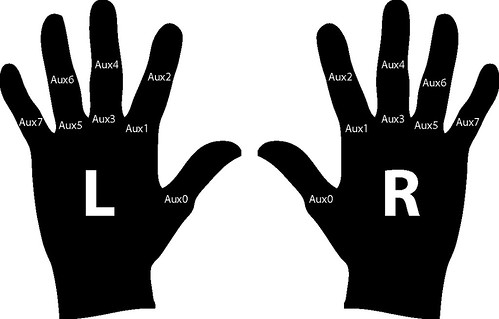
sensor connections (wrist x-imu):
AUX0 =
AUX1 =
AUX2 =
AUX3 =
AUX4 =
AUX5 =
AUX6 =
AUX7 =
RGB LED & motor connections (upper-arm x-imu):
AUX0 =
AUX1 =
AUX2 =
AUX3 =
AUX4 =
AUX5 =
AUX6 =
AUX7 =
Bolero Arduino connections (back x-imu):
AUX0 =
AUX1 =
AUX2 =
AUX3 =
AUX4 =
AUX5 =
AUX6 =
AUX7 =
Tools for working on the gloves:
– sewing machine
– soldering station, solder, desolder, helping hands
– iron and ironing board
– hot glue gun and glue
– snaps and tool (proper snap press)
– good light
– good fabric scissors
– wire clippers, wire strippers, flat-cable strippers
– tweezers
– glove patterns/stencils/documentation
– card-stock, paper
– geodreieck, ruler, pencil
– fabric chalk and markers
– masking tape
– files or sandpaper
– blade-less wire strippers
Materials for working on the gloves:
– fusible interfacing
– fabrics (neoprene, lycra, non-stretch fabric, mesh…)
– RGB LEDs
– high-flex ribbon cable
– vibration motors
– shoe goo
– clear resin (quick cure)
– casting supplies (measuring cups, mixing sticks…)
– liquid tape
– thread to match neoprene, lycra and other fabrics/electronics/materials
– selection of shrink tube – transparent or matching other material colours
– thin, flexible wire