Actual Robot Joint (23.9.2011) (2012)
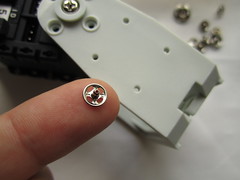
The actual robot joint/arm is much flatter than my mock-up. Somehow i had the black section rotated the other way. It is also nice to see the holes for attachment and a nice way of attaching the skin to the arm would be to use hand-sew snaps that fit the holes perfectly (unfortunately the ones in the photo are slightly too small). This way they would not inhibit the skin from being sensitive at the attachment points. If using machine snaps (these would penetrate all the way through the material) meaning that the sensitivity of the skin in that area would be compromised.

Another issue i see is that because the arm has hollows and cavities the skin will not always have something hard on both sides when it is being pressured. To some degree this could be evened out by knowing how the arm is bend, where these cavities are and compensating for the lack of pressure in code (adjusting the pressure range/sensitivity knowing that there is no bone on the other side to counter pressure). A more physical solution to this would be to really think about having a flesh layer between the arm (bones) and the sensor matrix (skin). Though for now, I think it makes sense to prototype the skin and see how well it works as is.


Neoprene stretched over joint. Way too bulky!

Snaps as connectors.